Calixdesign
Hong Kong
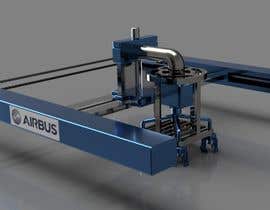
The goal of this contest is to design a grasping system that will be attached to a robot and can grasp items available in Airbus Warehouse. The grasping system will be mounted to a robot that can move in 3 dimensions. The grasping system receives the command based on a vision system (designed separately) which tells how to pick up the item. A separated document provides the figure of item that needs to be taken. Another document provides the guidelines on how your design must be presented and submitted
Click on the links below to see detailed design instructions, constraints and solution template for this problem. Please ensure you also read the T&Cs of the challenge within the attachment.
Challenge rules:
The prize will be awarded for the technically feasible solution, submitted by the contest deadline.
No working prototype is required for submission, but the design must be sufficiently detailed to allow experts to assess the feasibility of your design (i.e. comply with all requirements).
Only complete submission packages will be evaluated.
“Yau Sik T. provide an impressive design for Grasping System as part of Automatic Pick and Place challenge. He has been very responsive to all questions and able to adapt the design with few changes to meet our requirement. Great job!”
![]() Airbus, France.
Airbus, France.

콘테스트 등록 신속하고 간편한 절차
응모작 접수 세계적인 참가 범위
최우수 응모작 선정 자료 파일의 다운로드(초간단!)
