Alejandro10inv
Colombia

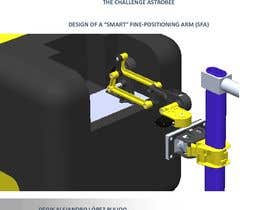
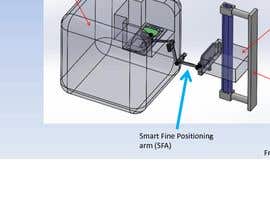
Design a “Smart” Fine-positioning Arm (SFA)
In this contest, you are asked to design a “Smart” Fine-positioning Arm (SFA) that will be mounted to Astrobee and move an attached tool to a specific location and command that tool to attach to an ISS Handrail. The SFA receives all power and high-level commands from Astrobee, but implements the following functions autonomously: stowing and deploying from a payload volume, positioning its free end at a specified location near an Handrail and orienting Astrobee by panning and tilting it.
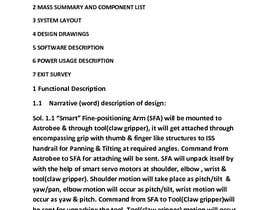
How it works: initially, the SFA will be packed in a stowed configuration. When powered and commanded by the Astrobee, The SFA must be able to autonomously perform three high-level functions. Each function requires a combination of performing operations itself and controlling the operations of the attached tool, as described below:
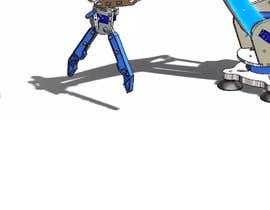
Attach, starting with Deploy, which involves the SFA unpacking from its stowed configuration in Astrobee’s payload bay and moving to a self-determined location in freespace; commanding the tool to “unpack” and standing by for a confirmation signal; place, which involves the SFA placing its free end (and the attached tool) at a specified pre-attach location near a Handrail; and then commanding the tool to “close” and standing by for a confirmation signal; and relaying that “attachconfirm” signal to Astrobee.
Orient, which involves the SFA panning and tilting Astrobee, as commanded, while the tool secures it to the Handrail; and sending a confirmation when each pan and tilt completes.
Stow, starting with commanding the tool to “release” and standing by for a confirmation signal; withdraw, which involves the SFA withdrawing the tool from the pre-attached configuration and moving it to freespace; commanding the tool to “pack” and standing by for a confirmation signal; and then stow, which involves the SFA repacking in Astrobee’s payload bay (stowed configuration); and sending a confirmation of stow to Astrobee.
Click on the links below to see detailed design instructions, constraints and solution templates for this problem.
Challenge rules:
The prize will be awarded for the lowest mass, technically feasible solution, submitted by the contest deadline.
No working prototype is required for submission, but the design must be sufficiently detailed to allow experts to assess the feasibility of your design (i.e., comply with all requirements) and the credibility of your mass estimate.
Only complete submission packages will be evaluated.
“Triassic R. developed an innovative design for a robotic deployment mechanism. This was a contest and this design was selected from 21 entries as the most feasible and least mass design. We continue to be impressed by Triassic's designs and the high quality of work. ”
![]() nasacoeci, United States.
nasacoeci, United States.





콘테스트 등록 신속하고 간편한 절차
응모작 접수 세계적인 참가 범위
최우수 응모작 선정 자료 파일의 다운로드(초간단!)